|
ilqgames
A new real-time solver for large-scale differential games.
|
Public Member Functions | |
| virtual std::vector< float > | Xs (const VectorXf &x) const =0 |
| virtual std::vector< float > | Ys (const VectorXf &x) const =0 |
| virtual std::vector< float > | Thetas (const VectorXf &x) const =0 |
 Public Member Functions inherited from ilqgames::Problem Public Member Functions inherited from ilqgames::Problem | |
| virtual void | Initialize () |
| void | ResetInitialTime (Time t0) |
| void | ResetInitialState (const VectorXf &x0) |
| virtual void | SetUpNextRecedingHorizon (const VectorXf &x0, Time t0, Time planner_runtime=0.1) |
| virtual void | OverwriteSolution (const OperatingPoint &operating_point, const std::vector< Strategy > &strategies) |
| bool | IsConstrained () const |
| virtual Time | InitialTime () const |
| const VectorXf & | InitialState () const |
| std::vector< PlayerCost > & | PlayerCosts () |
| const std::vector< PlayerCost > & | PlayerCosts () const |
| const std::shared_ptr< const MultiPlayerIntegrableSystem > & | Dynamics () const |
| const MultiPlayerDynamicalSystem & | NormalDynamics () const |
| const MultiPlayerFlatSystem & | FlatDynamics () const |
| virtual const OperatingPoint & | CurrentOperatingPoint () const |
| virtual const std::vector< Strategy > & | CurrentStrategies () const |
Additional Inherited Members | |
| Protected Member Functions inherited from ilqgames::Problem | |
| virtual void | ConstructDynamics ()=0 |
| virtual void | ConstructPlayerCosts ()=0 |
| virtual void | ConstructInitialState ()=0 |
| virtual void | ConstructInitialOperatingPoint () |
| virtual void | ConstructInitialStrategies () |
| size_t | SyncToExistingProblem (const VectorXf &x0, Time t0, Time planner_runtime, OperatingPoint &op) |
| Protected Attributes inherited from ilqgames::Problem | |
| std::shared_ptr< const MultiPlayerIntegrableSystem > | dynamics_ |
| std::vector< PlayerCost > | player_costs_ |
| VectorXf | x0_ |
| std::unique_ptr< OperatingPoint > | operating_point_ |
| std::unique_ptr< std::vector< Strategy > > | strategies_ |
| bool | initialized_ |
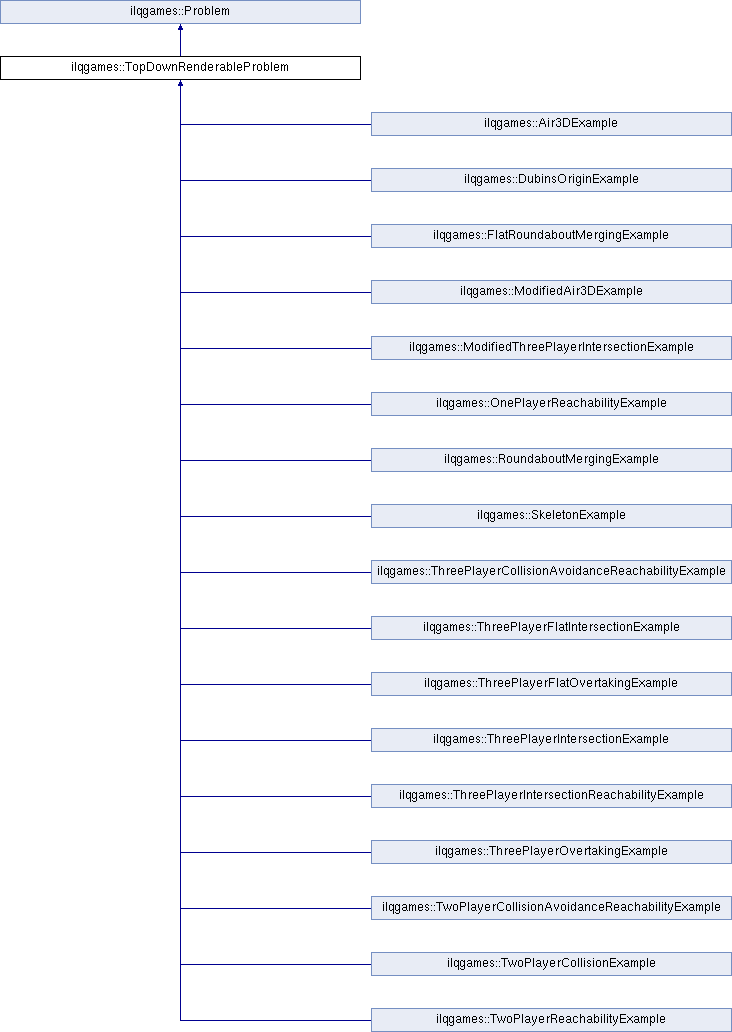
Definition at line 51 of file top_down_renderable_problem.h.
 1.8.11
1.8.11

